MERLIN Hand
MERLIN (Multi-sensory Electronics-integrated Robotic Limb for INtelligent manipulation) is a collection of next-generation robotic hand systems, including:
Highlights
- Exoskeleton-based data collection device for ROH-Hand
- Underactuated robotic hand for massage and physical interaction
- Next-generation dexterous robotic hand co-designed with a human-wearable demonstration device (ongoing)
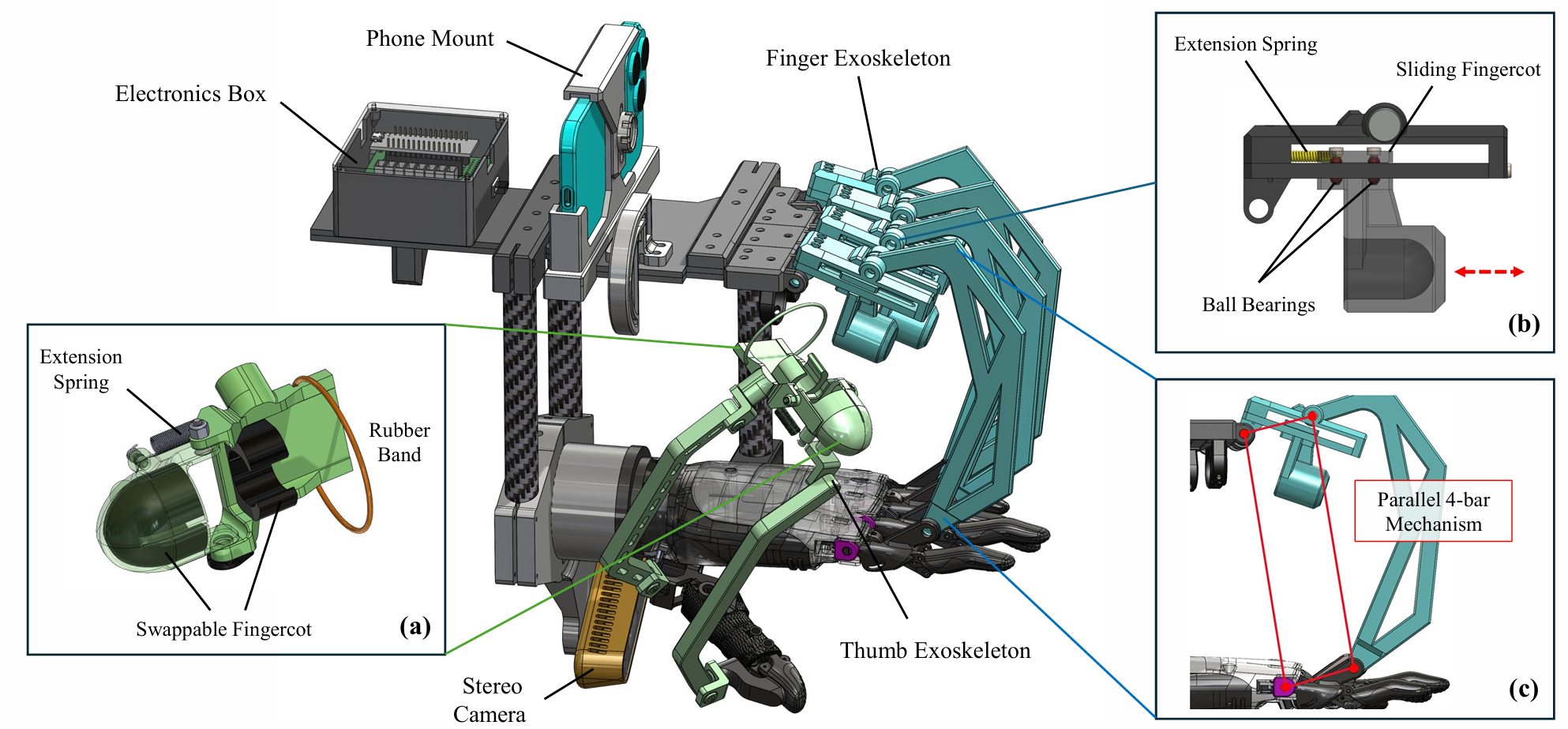
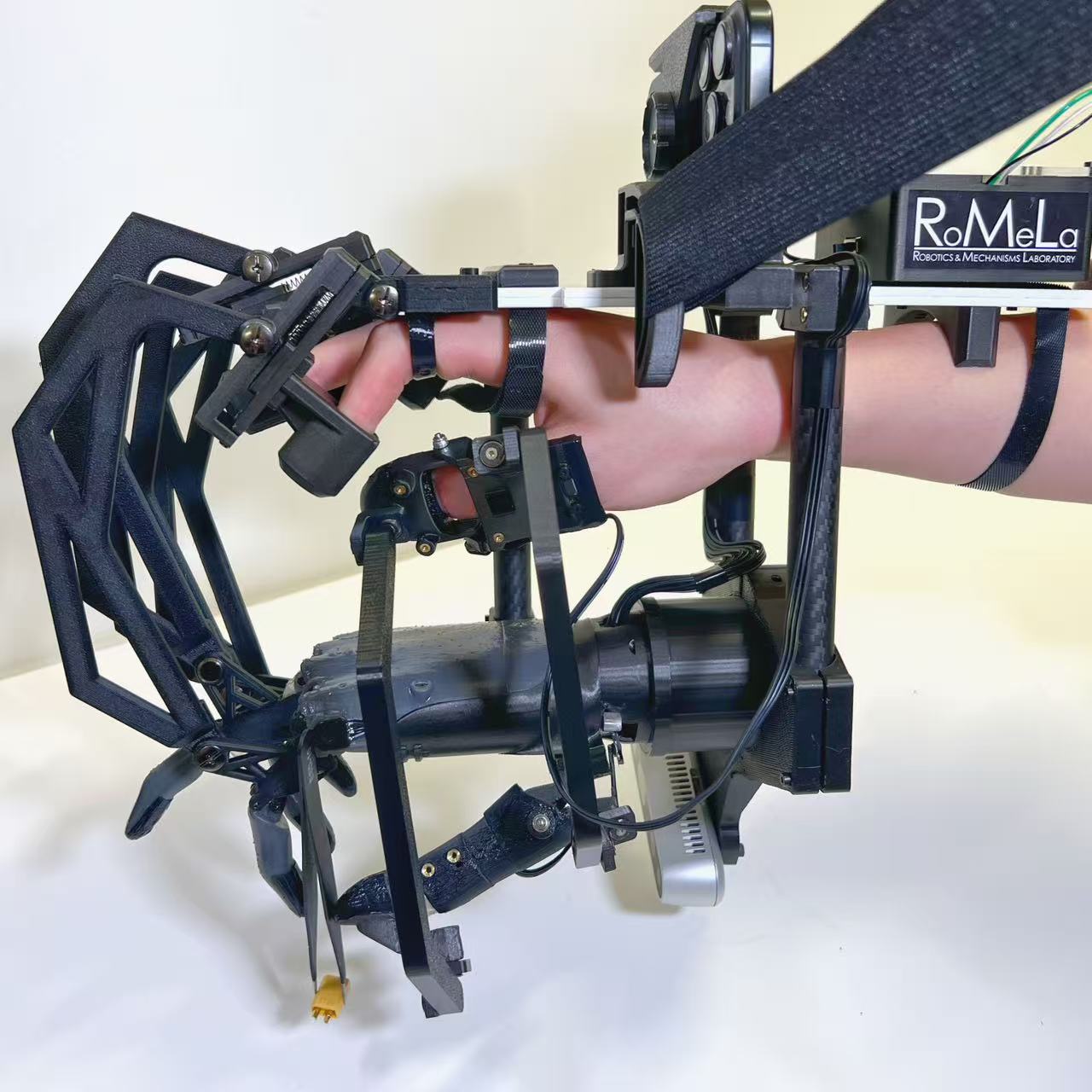
Data Collection Exoskeleton for ROH_hand¶
We develop a linkage-based data collection device for ROH-Hand that uses the human hand as a natural interface for transferring dexterous manipulation skills. Inspired by DexOP, the system physically couples human finger motion to a kinematically aligned pseudo hand, enabling direct haptic feedback during demonstration. This design improves wearability and reduces the embodiment gap between human motion and robotic execution, leading to more consistent demonstrations and higher task success rates.

Project Website¶
Publications¶
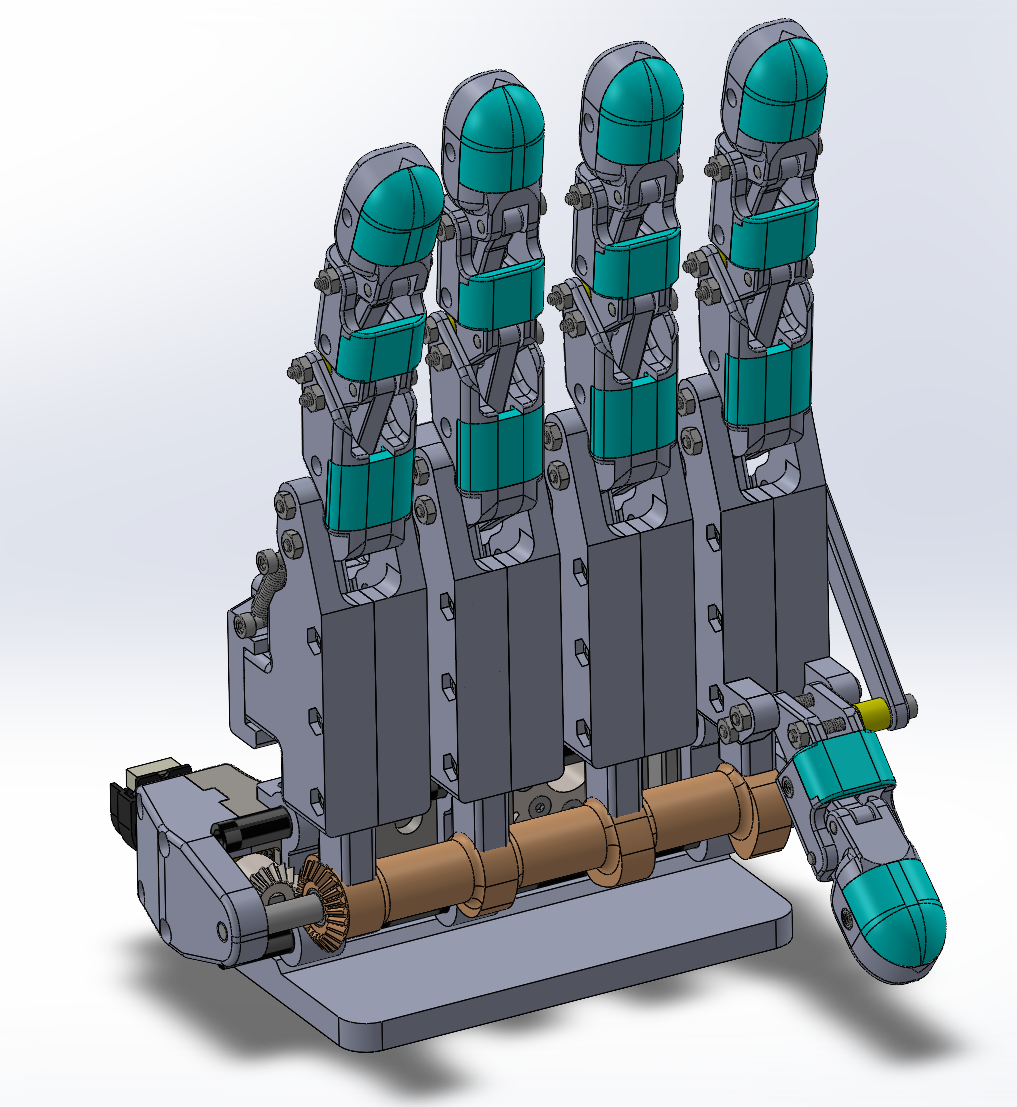
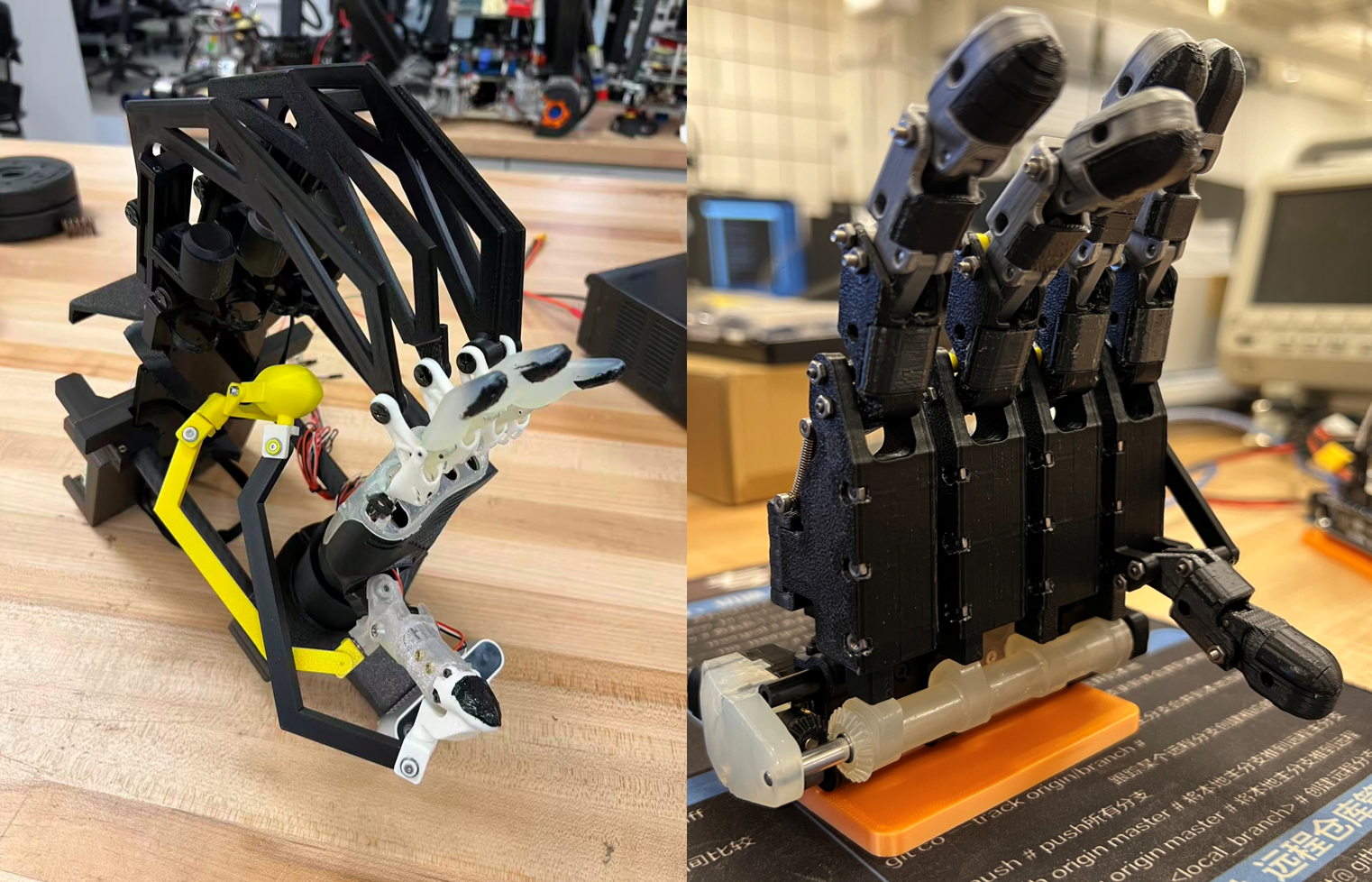
Underactuated Robotic Hand for Shoulder Massaging¶
The massage hand uses a minimalist actuation design—one Dynamixel servo and one N20 motor—to produce diverse massage patterns without explicit force control. A double four-bar linkage and passive springs provide compliant finger motion, while an offset cam mechanism adjusts initial contact positions. The Dynamixel servo closes the fingers and adapts contact forces through mechanical compliance and kinematic coupling.